NASA and other space agencies around the world periodically send robots and automated vehicles into space to study planets and other celestial bodies in our solar system. These missions can greatly improve our understanding of the environment and resources in other parts of the Solar System.
Researchers at the University of Toronto’s Institute for Aeronautics and Space Research and NASA’s Jet Propulsion Laboratory (JPL) recently conducted a study examining recovery strategies that could improve the efficiency and success of solar-powered lunar exploration. previously published articles arXivIt offers a new approach that could help solar-powered rovers safely leave permanently shadowed areas on the moon.
“In recent years, many countries have expressed interest in exploring the moon’s south pole, including the United States, China, India, Russia and others,” researcher Olivier Lamarr, who led the study, told Phys.org.
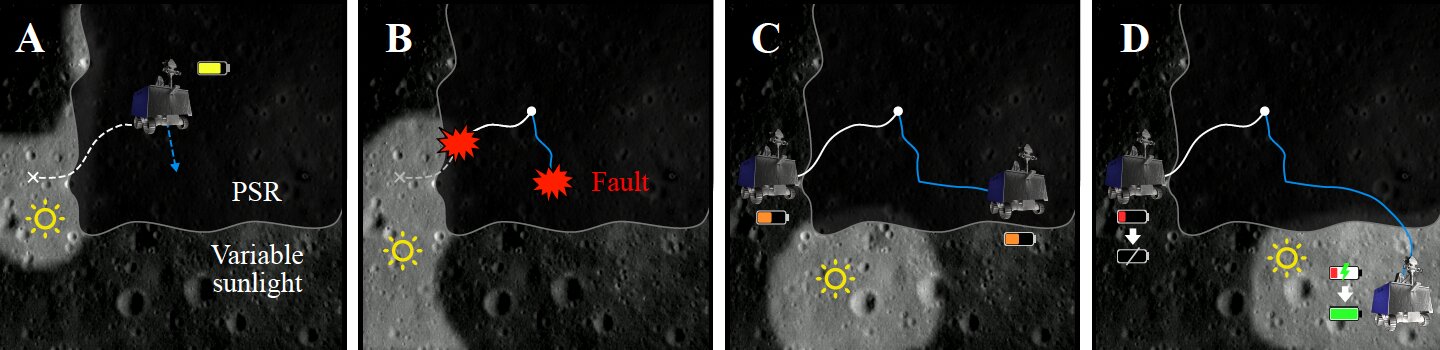
“Many plan to use solar-powered rovers to explore areas of permafrost (called permanently shaded regions or PSRs) that we suspect may contain large amounts of water ice. As you can imagine, entering PSR with a solar-powered rover is risky. an attempt! If the rover is delayed by malfunctions, it may not have time to return to sunlight before its energy runs out.”
Solar rovers may have numerous advantages in terms of energy efficiency, but they are limited by their dependence on sunlight to operate. Because some regions on the Moon are permanently in shadow, the rover’s dependence on sunlight may prevent them from safely exploring these areas and then depleting their energy during their missions and leaving them.
The main goal of the recent study by Lamarr and colleagues was to measure the probability of losing solar cells while exploring these shadowy areas on the Moon. Additionally, the team wanted to develop an approach that could help maximize the likelihood of solar-powered rovers completing their mission safely.
“First, we need to define what it means to be ‘safe’ for a solar-powered rover at the Moon’s south pole,” Lamarr said. “To do this, we pay attention to where the rover exits the PSR, when and how much energy is left in its batteries. This gives an indication of whether the rover can hibernate (and thus remain “safe” until then) before the next phase of its mission. We then calculate an online route planning method that the navigator can follow from any initial state (including inside the PSR) to maximize the probability of survival.”
The planning methodology outlined by Lamarr and colleagues is called recovery policy because it is essentially a fallback strategy that allows the rover to maximize its likelihood of reaching “safety” (i.e., areas where sunlight will reach to recharge its battery). . In their paper, the researchers show that calculating this recovery policy can be difficult in this context because it requires several approaches that can affect the reliability of overall estimates if they are too inaccurate.
“For example, time is a continuous dimension of our state space that needs to be discretized,” Lamarr said.
“We need to make sure that this approach/discreteization does not dangerously distort estimates of the probability of failure. At the Moon’s south pole, sunlight is very dynamic; nearby mountains and craters can cast large shadows on the surface. If the rover falls slightly behind schedule (approximately) compared to what policy requires, it’s critical “It could miss a solar charge period. The same is true if it’s slightly ahead of schedule compared to what the policy requires.”
Because these time estimates greatly affect the reliability of recovery policies for solar-powered rovers, Lamarr and colleagues have kept them very conservative. As a result, this increases the likelihood that the policy will remain secure during real-world missions, while minimizing the risk of failure.
“We believe this approach is beneficial in many ways,” Lamarr said. “First, it is a step towards long-term autonomous mobility planning algorithms that proactively assess (or ‘justify”) risks with solar-powered rovers. Additionally, our technique is formulated for human operators as we formulate new rover missions to the moon’s south pole (landing site selection, global It can be used for transition planning and risk estimation etc.) or even a useful tool to support an ongoing mission over the land in cycles”.
In the future, the recovery policy introduced by this research team can be applied to real-world exploration missions to the Moon to reduce the risk of losing solar vehicles in shaded areas. This approach will soon be able to be tested in a variety of realistic lunar scenarios, as the latest work was done in collaboration with NASA JPL.
“So far we have tested our approach using orbital data from Cabeus Crater, but we hope to use NASA’s own solar illumination maps and apply our technique to many other areas at the Moon’s south pole that will one day be visited by a robot or Shackleton, Faustini, Nobile. “We are also currently working on next-generation long-range navigation algorithms with risk estimation to explore the moon’s south pole using solar-powered rovers,” added Lamarr.